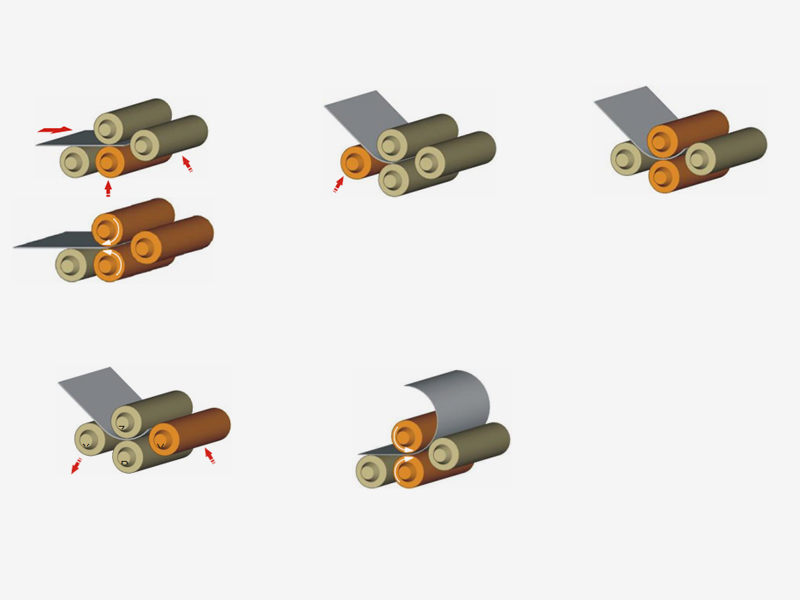
Betapa cekap tenaga adalah a Mesin rolling plat empat-roller servo elektrik CNC berbanding dengan sistem hidraulik penuh?
A Mesin rolling plat empat-roller servo elektrik CNC secara amnya lebih cekap tenaga daripada sistem hidraulik sepenuhnya disebabkan oleh faktor utama berikut:
Kawalan Ketepatan
Sistem pacuan motor servo menyediakan kawalan tork dan pergerakan yang sangat tepat. Tidak seperti sistem hidraulik tradisional yang sering berjalan secara berterusan, sistem servo hanya menggunakan tenaga apabila aktif, dengan ketara mengurangkan penggunaan kuasa terbiar.
Sistem hidraulik biasanya beroperasi pada kelajuan dan tekanan yang tetap, walaupun kuasa penuh tidak diperlukan, menyebabkan tenaga terbuang. Sebaliknya, motor servo boleh melaraskan kelajuan dan output kuasa secara dinamik, menggunakan tenaga hanya seperti yang diperlukan untuk operasi tertentu.
Mengurangkan Penjanaan Haba
Sistem servo menghasilkan kurang haba kerana mereka tidak bergantung pada cecair hidraulik yang sentiasa bertekanan. Kurang haba bermakna kurang tenaga dibelanjakan untuk menyejukkan dan mengekalkan kecekapan sistem. Selain itu, penjanaan haba yang lebih rendah diterjemahkan kepada jangka hayat komponen yang lebih baik dan mengurangkan haus dan lusuh.
Sistem hidraulik, sebaliknya, menjana haba yang ketara akibat pemampatan dan geseran bendalir, memerlukan tenaga tambahan untuk sistem penyejukan.
Keupayaan Pemulihan Tenaga
Motor servo elektrik selalunya mempunyai sistem pemulihan tenaga, terutamanya semasa fasa nyahpecutan atau brek. Ini bermakna tenaga yang jika tidak akan dibazirkan ditangkap semula dan digunakan semula, menyumbang kepada kecekapan keseluruhan.
Dalam sistem hidraulik, pemulihan tenaga adalah kurang biasa, kerana bendalir hidraulik tidak mudah membenarkan penangkapan semula tenaga tersebut.
Mod Siap Sedia Lebih Senyap dan Cekap
Apabila mesin melahu, sistem dipacu servo boleh memasuki mod kuasa rendah atau dimatikan sepenuhnya, menggunakan tenaga minimum. Sistem ini sangat senyap, menyumbang kepada penjimatan tenaga dan persekitaran kerja yang lebih menyenangkan.
Sistem hidraulik cenderung untuk mengekalkan tekanan berterusan walaupun semasa melahu, yang memerlukan kuasa berterusan untuk mengekalkan keadaan itu, yang membawa kepada penggunaan tenaga yang lebih tinggi semasa masa henti.
Penjimatan Tenaga Jangka Panjang
Dari masa ke masa, sistem servo menyediakan penjimatan tenaga terkumpul, terutamanya untuk operasi yang memerlukan gerakan mula-henti yang kerap, kelajuan berubah-ubah, atau kerja berketepatan tinggi. Sistem melaraskan keperluan kuasa secara dinamik, menghalang penggunaan tenaga yang tidak perlu.
Mesin hidraulik, walaupun selalunya lebih ringkas dan lebih teguh dalam sesetengah aplikasi tugas berat, tidak menawarkan pengurusan tenaga diperhalusi yang sama, yang membawa kepada kos operasi yang lebih tinggi dalam tempoh yang panjang.
Mesin rolling plat empat-roller servo elektrik CNC boleh menjadi 20-50% lebih cekap tenaga berbanding sistem hidraulik penuh, bergantung pada aplikasi dan keadaan operasi. Perbezaan ini disebabkan terutamanya oleh keupayaan sistem servo untuk melaraskan kuasa secara dinamik, mengurangkan penggunaan tenaga terbiar, menurunkan penjanaan haba dan memulihkan tenaga.
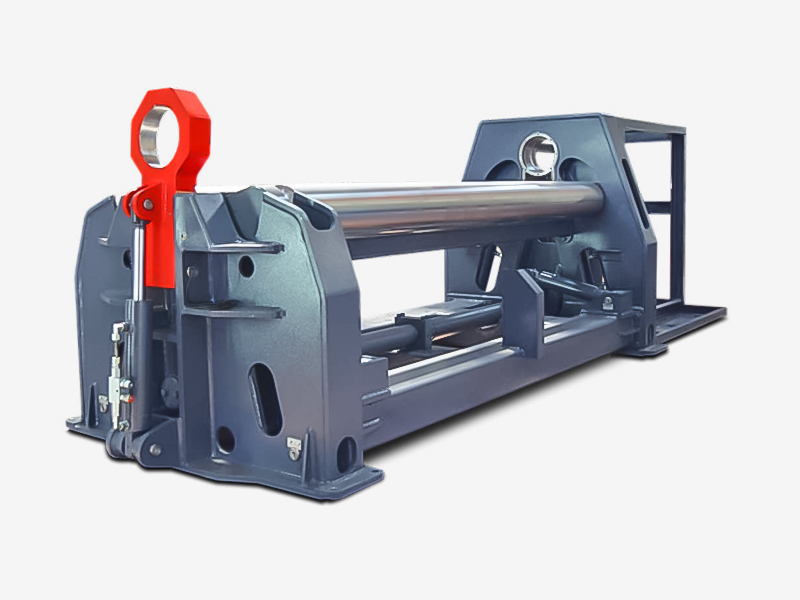
 Generasi baharu teknologi hibrid minyak-elektrik, penjimatan tenaga dan pengurangan pelepasan, kecekapan tinggi dan haba yang rendah, dan bunyi kerja yang sangat berkurangan;
Generasi baharu teknologi hibrid minyak-elektrik, penjimatan tenaga dan pengurangan pelepasan, kecekapan tinggi dan haba yang rendah, dan bunyi kerja yang sangat berkurangan;